Explore Eddyfi Technologies Product Lines
How to Retrieve Foreign Material from Nuclear Reactor Pools
Ask an expertWhen maintenance is performed on a nuclear reactor’s associated rod drives and limit switches, personnel typically work on a platform over an open nuclear fuel pool. Water shields radiation and keeps fuel cells cool, and these pools of water surrounding nuclear reactor cores are designed to slow down the high energy particles that occasionally escape the core. In a nuclear research environment, the reactor tank is usually partially covered with aluminum deck plating to allow operators and researchers access to the cavity for experiment loading and unloading.
With a goal of increasing nuclear safety and reducing power plant down time, industry has taken steps to comply with Foreign Material Exclusion, or FME, guidelines. This process prevents the introduction of external material such as dropped tools in a region where they could potentially pose a safety or operational hazard. Admittance of foreign material into primary or secondary nuclear plant systems, equipment, and components may cause equipment deterioration or failure and therefore lost generation. Moreover, it can increase operating and maintenance costs and risk to worker safety.
Human error continues to drive the need for FME in the nuclear industry. Whether it is a personal item like eyeglasses or personal protective equipment, handheld tools or fasteners, or reactor components such as limit switches and hardware, it must be located and retrieved as quickly as possible.
The Challenge
Safely retrieve small objects from a restricted and hazardous area located inside of a nuclear reactor fuel pool.
Dropping a tool bag into a pool tank is not the worst thing that can happen at a nuclear reactor; however, dropping anything into the nuclear fuel pool still requires immediate action. In this application, the foreign objects needed to be recovered from an open pool of water 3.05 meters (10 feet) in diameter with a depth of 9.14 meters (30 feet). Access to the small handheld tools, bolts, and washers on the pool floor was less than 228 millimeters (9 inches) wide by 305 millimeters (12 inches) high. In particular, they needed to be extracted from an area that was flat in a curved annular space between the core and inner baffle plate. The baffle plate shields the reactor core from a direct return flow from the bulk cooling system. In addition to the difficult-to-access environment to retrieve these relatively small items, other factors included the water pH of approximately 6.0 with underwater operations estimated at up to eight hours at a time and moderate radiation levels around 10 REM, or Roentgen Equivalent Man, per hour.
The Solution
Custom robotic solution with purpose-built end effectors designed to locate and retrieve foreign material.
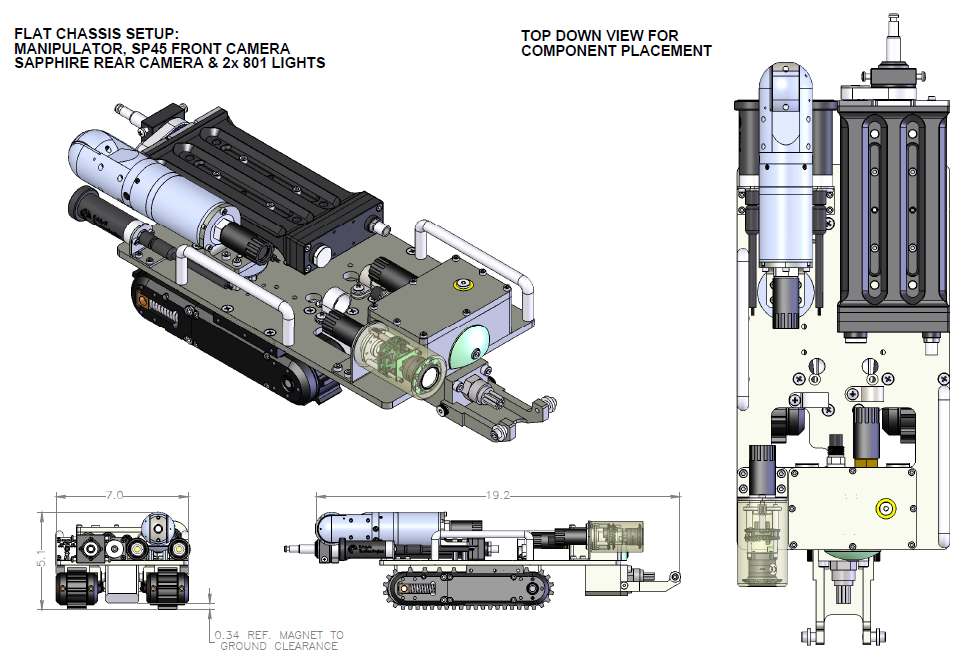
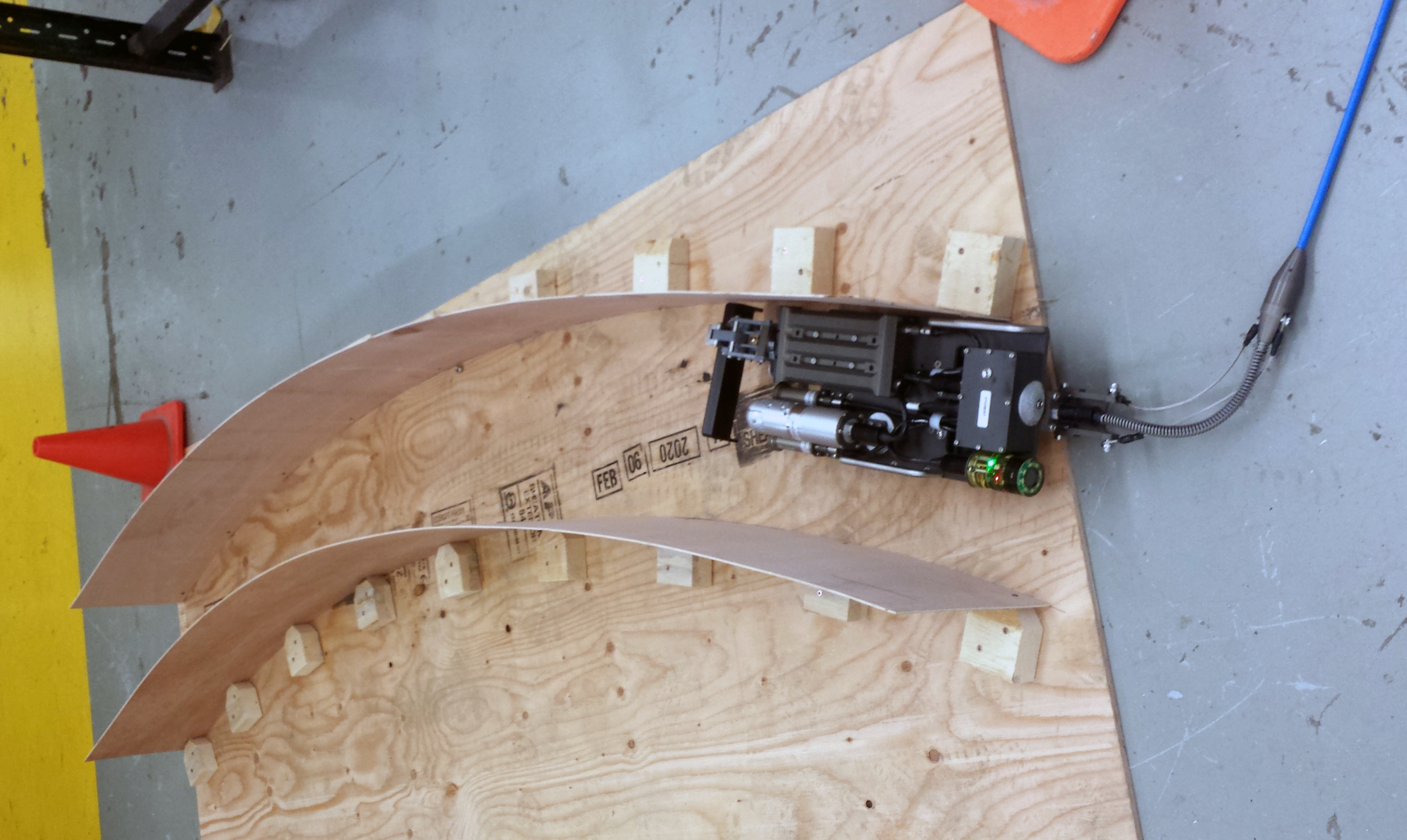
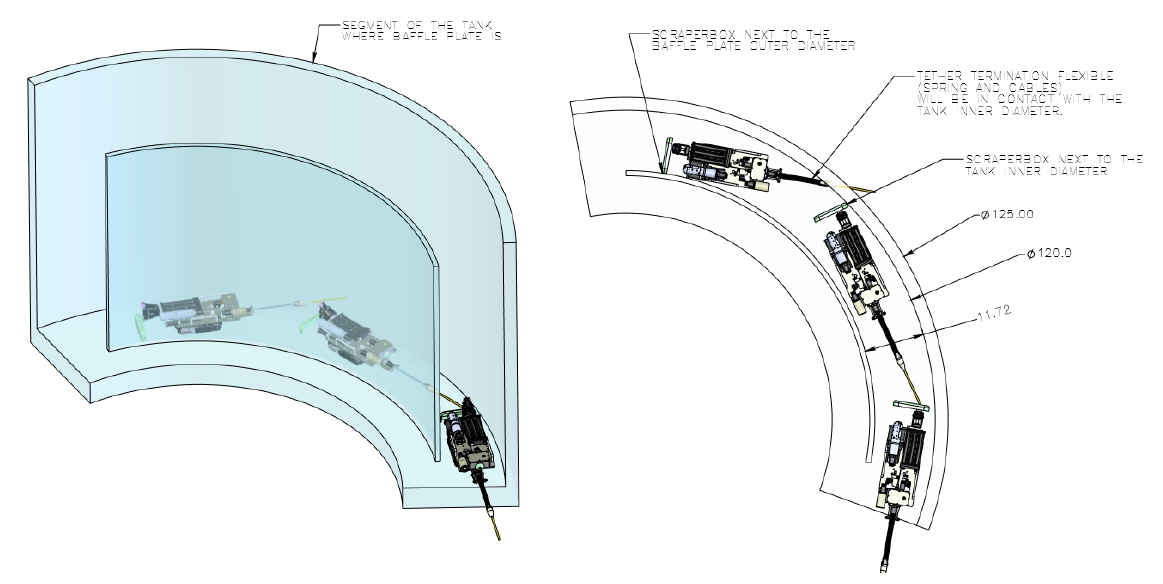
Robotics continue to demonstrate their value for remote operations in hazardous environments, and an OnSpec custom solution built on proven modules forming the Foreign Object Search and Retrieval, or FOSAR, crawler system employed here is no exception. The FOSAR robot is based on the Versatrax™ 100 platform with a forward-facing Spectrum™ 45 pan-and-tilt color inspection camera, rear-facing fixed focus camera, 2-axis manipulator drive unit with custom clamshell and scraper jaw sets, all driven by an ICON™ portable controller. The shape and orientation of the custom chassis was built to fit between a segment of baffle plate and the outer tank wall. The entire vehicle weighed 10.4 kilograms (23 pounds), below the limit for safe lifting procedures.
The equipment is depth rated to 60 meters (200 feet) and capable of being submerged for up to eight hours at a time. Corrosion was avoided with aluminum machined parts anodized for protection. It was designed to operate at the standard temperature of 40 degrees Celsius (104 degrees Fahrenheit). It is worth noting that the pool temperature typically remains at ambient temperature even though fuel temperatures are near 1,000 degrees Celsius (1,832 degrees Fahrenheit) at the fuel centerline. The crawler is also radiation tolerant, ensuring successful FOSAR operations. To avoid failure due to radiation, the crawler simply needed to be monitored for degradation and rinsed after operation in the pool.
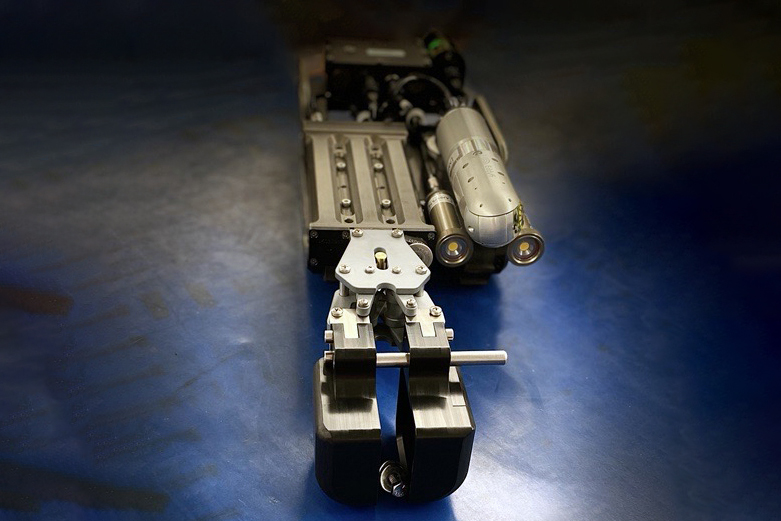
The first end effector was used to scrape or rake foreign objects like bolts from behind the baffle plate while the second end effector was used to pick up and capture foreign objects from the bottom of the pool. The remotely operated crawler was designed to pick up items smaller than 25.4 millimeters high by 63.5 millimeters wide by 63.5 millimeters long (1 inch by 2.5 inches by 2.5 inches) weighing less than 0.9 kilograms (2 pounds), all within the parameters of this application.
Ask an ExpertFactory Acceptance Testing
Beyond Inspection
We create technology that enables people to perform tasks that they could not otherwise do, in places they could not otherwise go. OnSpec Robotics enable access to areas that are too dangerous or remote for direct human intervention, providing time and cost efficient operations. Learn more
Benefits
- Quick delivery timeline unprecedented by industry standards with final product tested to ensure successful deployment.
Given everything involved with designing a bespoke solution for a specific application, the timeline is quite considerable. With an OnSpec custom solution built on proven technology, this project was completed extraordinarily fast by nuclear project expectations. This includes specification and project planning; mechanical and electrical engineering, firmware, and software design; machining and manufacturing, system assembly, system integration, factory acceptance testing, and shipment.
Provide Eddyfi Technologies with your unique problem, and we will provide the Beyond Current solution. Contact our experts today.